作者:Daniel Hou

随着越来越多的技术广泛应用于工业自动化,我们已经进入了工业4.0时代。新技术不断涌现,赋能人工智能和机器学习、数据分析、工业网络、网络安全和功能安全。然而,大多数工业自动化作为其他所有技术的核心,仍然依靠机器人和运动控制。
运动控制与电机控制经常同时出现,有点让人混淆。这两个概念有什么区别?在工业自动化中,我们如何将恰当的解决方案应用于其中一个概念,或同时应用于这两个概念?欢迎继续阅读,了解运动控制和电机控制的区别以及如何使它们协同工作。
什么是运动控制?
运动控制是工业自动化系统的子系统。它同步化控制多个电机来完成一系列运动。例如,多轴机械臂需要多个电机无缝地协同运行才能做出特定的动作。运动控制主要用于轨迹规划、速度规划、插补算法和运动学转换。运动控制系统经常出现在印刷、包装和装配应用中。
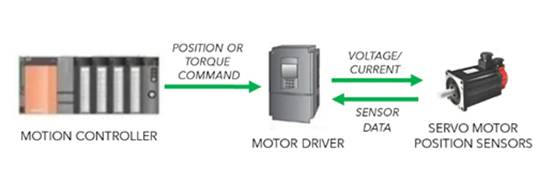
如下所示,运动控制系统通常由以下主要组件组成:
• 运动控制器,可生成轨迹规划,然后向电机驱动器提供控制命令。
• 电机驱动器,将运动控制器的控制命令(通常是速度或扭矩信号)转换为更高功率电压或电流信号来驱动电机
• 数个电机,可根据控制命令执行运动
• 位置传感器,将电机转子的位置/速度数据提供给位置/速度控制器,实现精确的位置/速度控制
设计新一代智能互联安全工业驱动变得简单易上手。阅读最新的博文。
电机控制与运动控制
另一方面,电机控制是更侧重于控制电机旋转的系统或技术。典型的电机控制系统调整单个电机的扭矩、速度和位置的一个或多个参数,以达到目标值。电机的类型不同,驱动电机的要求和技术可能会有很大差异。电机控制器通常没有规划能力(高级驱动器只有简单的位置和速度规划能力)。因此,解释电机控制和运动控制区别的简单方法是:
• 电机控制是运动控制系统的一个环节(通常是电流环,在扭矩控制模式下工作)
• 但是,有时我们可能会混淆它们,因为电机控制的位置环/速度环/扭矩环既可以在电机控制器中使用,也可以在运动控制器中使用
现在我们知道了这两个系统之间的差异,显而易见,它们的设计要求及资源也大不相同。
电机控制更侧重于使电机正常旋转,或者更确切地说,是换向。为了做到这一点,电机控制器需要与各种传感器对接,处理模拟和数字信号,并生成波形来驱动电机。所有这些都发生在非常短的时间环路内,范围从50微秒到300微秒。
然而,运动控制通常充当系统监控器,需要在多个电机控制器之间、通过以太网(EtherCAT和TSN.)、CAN、RS485的数据等其他来源之间,以及人机界面(HMI)面板的命令之间进行通信。如上所述,运动控制器还可以参与一些电机控制任务,例如控制速度环、位置环,甚至扭矩环。因此,运动控制器的实时控制环路可以从100微秒到数百毫秒不等,具体取决于运动控制器参与的实际任务。
运动控制系统的设计
运动控制系统的设计可能相当复杂,涵盖了电机控制、工业网络、人机界面、编解码器、信息安全和功能安全等许多方面。因此,它需要多个控制单元在系统中相互协调。
这里就需要全套器件方便运动控制设计人员选择――也是恩智浦及其广泛的微控制器(MCU)和微处理器(MPU)产品组合的用武之地。
在电机控制器方面,恩智浦的Kinetis V MCU、Kinetis E MCU、LPC MCU和数字信号控制器(DSC)提供了多种选择,从使用ARM®Cortex®-M0+内核控制简单电机,到使用Cortex-M33内核或高效DSC内核在双电机上运行FOC算法。使用备受欢迎的无闪存i.MX RT跨界MCU,可以同时精确控制更多电机。这些MCU不仅具有广泛的处理能力可供选择,还集成了非常适合电机控制的外设,如高速的高精度ADC、高速比较器、灵活的电机控制定时器和PWM以及DSP加速度传感器。故障检测和自动关机等安全功能可以与这些器件提供的工业安全合规性无缝协作。
哪种MCU最适合您的电机控制设计?探索我们全面的电机控制指南,了解最新的解决方案。
而在运动控制器方面,恩智浦提供i.MX RT跨界MCU和MPU产品线,包括Layerscape和i.MX系列处理器。这些器件支持集成丰富的工业通信接口,例如以太网/IP、Profinet、EtherCAT和TSN等接口。多核架构为通信协议、运动轨迹规划和实时环路控制提供了足够的动力。它们还配备了先进的计时器,以支持多模式计数和灵活的脉冲串输出。
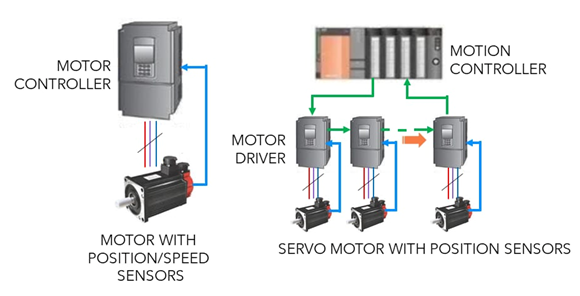
如图所示,运动控制系统可以使用大量的MCU和MPU来实现多个电机驱动器,促进各个机械臂协同运动
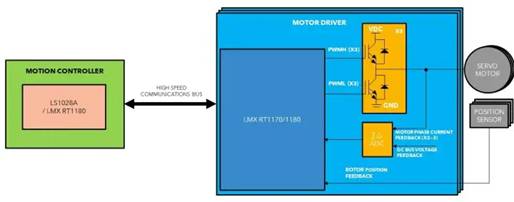
为了加快运动控制系统的上市,我们迫切需要一种快速简便的概念验证和原型制作方法。因此,恩智浦一直在开发参考设计平台,以提供丰富的工业运动控制功能并符合工业自动化标准。我们最近推出了i.MX RT工业驱动开发平台,该平台基于i.MX RT跨界MCU,具有多电机控制、确定性通信和符合IEC 62443安全标准的基础。四电机控制开发平台现已上市,可支持全套恩智浦产品,包括i.MX RT跨界MCU和EdgeLock® SE050安全元件。这些器件协同工作,展示了工业电机控制系统所需的功能,例如电源管理、驱动四个电机、工业通信接口、HMI触摸面板界面和安全集成。
综上所述,本文介绍了运动控制的定义、电机控制和运动控制的区别,以及运动控制系统设计要求的行业趋势。继续关注恩智浦,了解更多电机控制解决方案。
作者:

Daniel Hou
恩智浦半导体工业边缘处理大众市场团队技术营销人员
Daniel Hou是恩智浦半导体工业边缘处理大众市场团队的技术营销人员,为工业细分市场的新兴微控制器和微处理器用例提供支持。他之前曾在半导体行业担任过应用工程和市场营销方面的职务,拥有美国罗斯-霍曼理工学院(Rose-Hulman Institute of Technology)电气工程硕士学位。 |