电机驱动的一大关键是准确知道转子的位置,有感电机通过传感器获取转子位置,无感电机只能通过间接方式获取电机转子位置,常见的方法有反电动势法、电感法、磁链法、高频脉冲法及其它智能方法,应用最多的是反电动势法
反电动势法无刷无感电机驱动电路可主要分为三部分:功率驱动部分,控制部分,转子位置检测部分
一. 功率驱动部分
功率驱动部分有二种实现方式,一是使用集成电机驱动IC,二是使用分立元件搭建。使用集成IC更加简单,而且大多驱动IC都集成了多种保护功能,更加可靠,但成本较高。
使用分立元件搭建有二种:
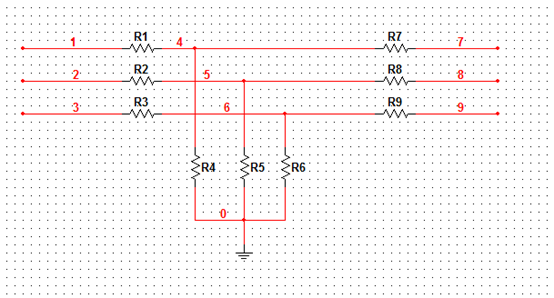
① 使用N + P管,如下图,这种方式实现简单,而且PWM控制信号占空比能达到100%,但P管价格相对较高,一般电流在100A,耐压在100V内,多应用于低压小功率应用
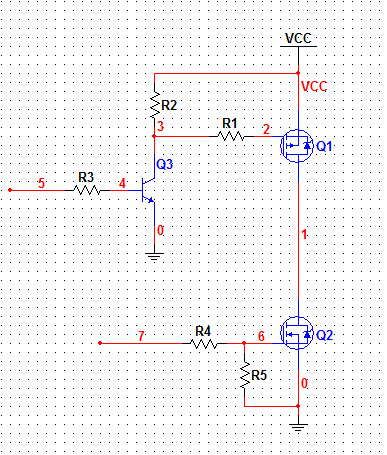
R1,R4一般在100Ω以内,但也不能太小,一般为几十Ω,R2,R3,R5一般为几K到几十K
②使用全N管,如下图,N管耐压及功率可选范围很宽,所以适用于各种应用电路,但上臂桥驱动较复杂,如果采用自举升压电路,PWM占空比不能达到100%
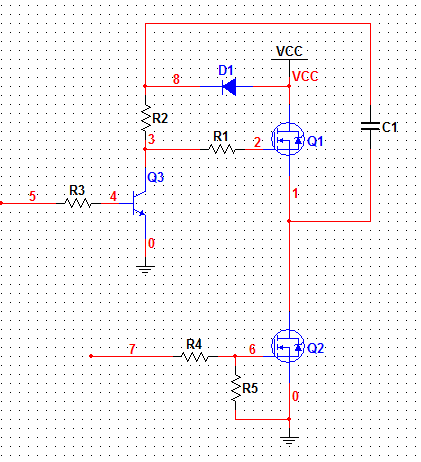
上图用比较简单的方式实现上臂的自举升压,D1为自举二极管,一般采用快恢复二极管,C1为自举电容,具体大小可参考公式
二. 控制部分
此部分大致为MCU最小系统,根据所采用的MCU的不同而不同,一般使用内部晶振。带有比较器、PWM定时器的MCU为比较好的选择。
三. 转子位置检测部分
此部分是一个关键部分,根据使用驱动方法的不同而不同,主要的二种为反电动势检测与电流检测
①反电动势检测
此法的理论基础是电机在运转时会产生反电动势,在PWM导通器件的过零时刻,悬浮相的端电压与中点电压相等,硬件方法可建立一个虚拟中性点与端电压比较,实际中大多使用软件采样比较方式
使用软件进行采样有三种方式:
1. 在功率管导通时刻采样
二相导通时,中点电压等于母线电压的一半,因此可用母线电压的一半作为参考电压与第三相进行比较。
母线电压一般较高,即使分半之后的电压也可能高于MCU端口承受电压,因此一般要用电阻进行分压,这使得过零点的检测灵敏度受到影响,而且由于在导通时间内进行采样,因此必须有一个最小导通时间,电机低速运行受限制
2. 在功率管关闭时刻进行采样
在上管关断,下管恒通的状态下,续流电流会流过下管体二极管,中点电压理论值为0,为提高准确性,可将MCU内部参考电压设为一个略高于0的值,如0.2,然后采集第三相与此值比较。
这种方式无需电阻分压,提高了检测灵敏度,同时抑制了高频开关干扰,但需考虑MCU端口承压能力,而且需保持一个最小关断时间,因此PWM占空比无法达到100%
3. 在功率管全状态采样
如下图,此种方法结合了以上二种方法的优点,克服了双方的缺点
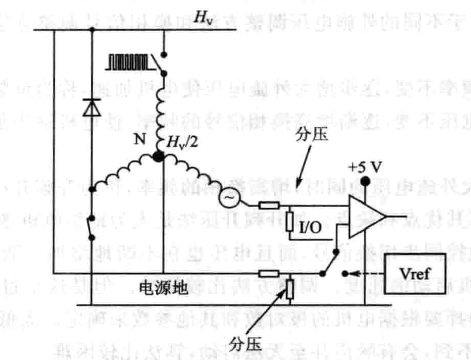
在大多数实际应用电路中,多采用方式一,如下图,两端分别接到电机三线与MCU
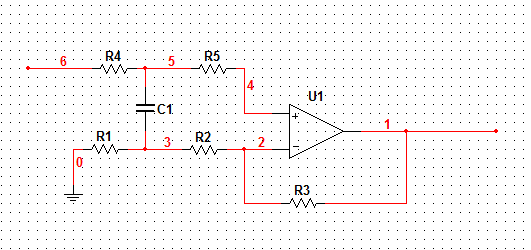
②电流检测法
此法多应用于FOC控制中,如下,在三端回路中接上电流采样电阻,采集相电流,经放大器放大后送入MCU,
转载于:https://www.cnblogs.com/yueze/p/6995378.html |