���ߣ�Jens Sorensen��Dara O��Sullivan
���Ľ��ص��ע��������������Ť���Ʋ������ǽ���ÿ�������з���������������ȵؼ�С�������Ӱ��ķ�����
ժҪ
���κ����ص���������У�һ�����ɻ�ȱ�IJ��������������������������Ť���Ʋ���Ť�ؽ���ʱ���ϵͳ����ֱ����ء���Ȼϵͳ���������������֮�����ǿ��ع�ϵ�������ѽ���ת���ɶԷ���ϵͳ��Ӳ��Ҫ��ϵͳ�Ƕ����������Ľ����������Ƴ������������Ż��ķ���ϵͳ��ͬʱ����ָ�����Դ�������ۻ���ЧӦ��
1. ���
������·�ڵ�����������ŷ�(��ͼ1)�е�����ֱ��Ӱ������Ť�����(Ť�������ƽ����Ӧ������Ҫ)�Լ���ȷ��λ���ٶ����ߡ�ƽ��Ť�������һ���ؼ�����ָ����Ť���Ʋ�����Է����������и�Ӧ����Ϊ��Ҫ���ڴ���Ӧ���У�Ť���Ʋ���ֱ��ת ��Ϊ��ʵ�ֵ��ն�Ӧ�þ��ȡ���������Ч��ֱ���ܿ��ÿ��ƴ���Ӱ����Զ���Ӧ�ã���Ӧʱ��ͽ���ʱ����������·��̬��صIJ����dz���Ҫ���������Ʊ����⣬�������ڵĶ������Ҳ��ֱ��Ӱ����Щ���ܲ�����
һ������������ڲ��ж��Ť���Ʋ���Դ��һЩԴ�ڵ�������������ɶ�������Ͷ��Ӳ۲����Լ�ת��EMFг������ijݲ�Ť�ء�1 ����Ť���Ʋ���Դ�����������ϵͳ2 �е�ʧ��������������(��ͼ1)��
���������ʱ��Ҳ��ֱ��Ӱ��Ť���Ʋ�����Ϊ���Ὣ���ӵ�Ƶ�ʵĵ�Ƶ(��Ҫ��5�κ�7��) 3 г������������PWM�����ѹ����������£��Ե�����·��Ӱ���������·��г��Ƶ���ϵĿ�����������ء�
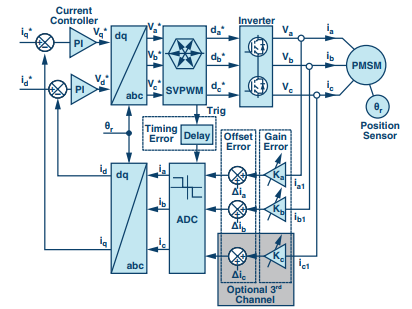
ͼ1. ����·���о��з�����Ԫ���ĵ���������еĵ�����·��
2. ����������������Ť���Ʋ�
3�����ŵ���ĵ��Ť�ع�ʽΪ
 (1)
(1)
TeΪ���Ť�أ�PPΪ�����������PMΪ���Ŵ�ͨ����Ld��LqΪͬ ����ת�ο�ϵ�еĶ��ӵ�У�id��iqΪͬ����ת�ο�ϵ�еĶ��ӵ���������̬�����������£�id��iq��ֱ��������ˣ�������Ť��Ҳ��ֱ������id��iq�д��ڽ�������ʱ��������Ť���Ʋ�������idq�Ͳ�����Ť��֮����ֱ�ӹ�ϵ����˱��IJ��õķ����Ƿ������ֲ���������Ӱ��id��iq���˷�����3�����ĵ�������Ϊ������
 (2)
(2)
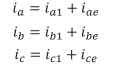
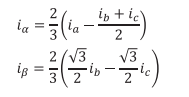
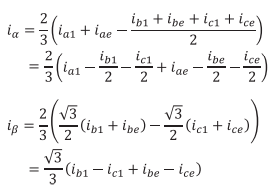
���У�ixΪ��õ������(x = a��b��c)��ix1Ϊʵ���������ixeΪ������δ��������������κμ��裻������ʧ������������������������Clarke�任ʱ������ͶӰ����ֹ2����i�� ��i���ϣ�
 (3)
(3)
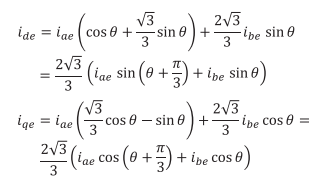
����Park�任ʱ������ͶӰ����ת2����id��iq�ϣ�
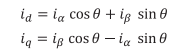 (4)
(4)
���У���Ϊת�ӵĽǶȡ�����3�����Ĵų�������ƣ���Ҫ֪���������������һ�ֳ��÷����Dz��������������������Ҫ��������������������ͨ�����������÷����ǽ���������ͨ����Ȼ������������������ڳɱ�������ԭ���������Ͳ���ͨ����Խ��Խ�ã����������ֽ��ᵽ��������������� ����ʹϵͳ�����ȶ���Ӧ�Բ�����
2.1 �������
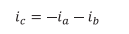
���ȿ��Dz������������3��������������������ڵ����ܺ�Ϊ0�ļ����½��м��㡣������ia��ib����ic�ļ��㹫ʽΪ��
 (5)
(5)
���ù�ʽ(2)��ʽ(5)��
 (6)
(6)
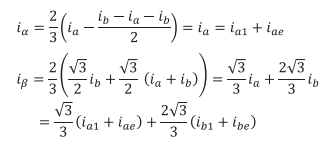
�ھ�ֹ�ο�ϵ�У�����Ϊ��
 (7)
(7)
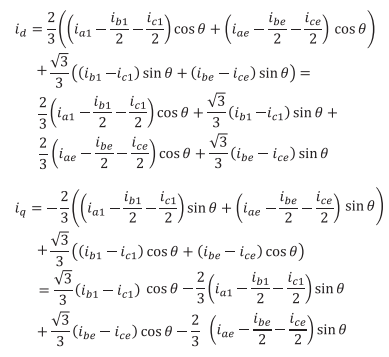
����ת�ο�ϵ�У�����Ϊ��
 (8)
(8)
ע�⣬id��iq����һ����ʵ����λ������ص����һ������������ص���(idq = idq1+ idqe)�����ڴ˷����������ide��iqe��Ϊ��Ҫ��
 (9)
(9)
2.2 �������
���ڿ��Dz����������������3������������������ͨ��ʱ���õIJ��裬�ó���ֹ������ת����
 (10)
(10)
����ת�ο�ϵ�У�
 (11)
(11)
ͬ����������ʽ��һ����ʵ����λ������ص���idq1)��һ������������ص���(idqe)�������ide��iqeΪ��
 (12)
(12)
3. �������ʱ��
���������ɿ��ص�ѹԴ���������ʱ����λ�������Կ���������������ɣ����������Ϳ��ط���(��ͼ2A)��

���ڿ���Ŀ�ģ������������ط����������Ӱ��������ƻ�·�����ܡ���ȡƽ�������ij��÷����Ƕ���PWM����ͬ���ĵ��� ���в�������PWM���ڵĿ�ʼ���м䲿�֣�����ȡƽ��ֵ���� ����������Щʵ������ͬ���������Ч���ƿ��ط�������ͼ2B ��ʾ�����ǣ�����Ե������в���ʱ����ʱ�������� ������Ӷ����µ�����·�������½�������������ʱ�����ij��Ե�����·��Ӱ�죬�Լ����ʹϵͳ���ȶ����ܹ�Ӧ�� ����ʱ����
3.1 ����������еIJ���ʱ�����
��λ�����Ļ�������ͨ������ʮHz��Χ�ڣ�������·�Ĵ���ͨ������kHz��Χ�ڣ�����С��ʱ�����Ҳ����Ӱ��������ܣ����ƺ�Υ��������Ȼ������������di/dt��ֻ�����У���ʹ��С��ʱ�����Ҳ���ܵ��������ĵ���ʧ�档���磬��5 mH������˳���1 ��s��250 V��ѹ�����µ����仯50 mA�����⣬����ϵͳ���õ���������Ϊ10 A��12λADC����ʱ��������ADC�ĵ�4.3λ��ʧ�������������ʾ����ʧλ��������Ρ����Ҳ���ܵ� �·���ϵͳ�г���Ť���Ʋ���������
�������ʱ�̵����ԭ��Ϊ��
�� PWM��ADC֮�����·���㣬������ȷ��ʱ�������
�� ȱ���㹻�Ķ���ͬ���������ֵ�·(������������ȡ���ڱ��� ��λ����Ŀ)��
�� դ�������źŴ����ӳ٣����µ����ѹ��PWM��ʱ�����ࡣ
һ����ԣ��������ʱ�̵����س̶��ɿ���Ӱ��di/dt������ȷ������Ȼ��ʱ�����Ĵ�СҲ����Ҫ�����ǵ���ٶȡ����ء�����迹��ֱ�����ߵ�ѹҲ���������ֱ��Ӱ�졣
3.2 ��������ϵͳ���ܵ�Ӱ��
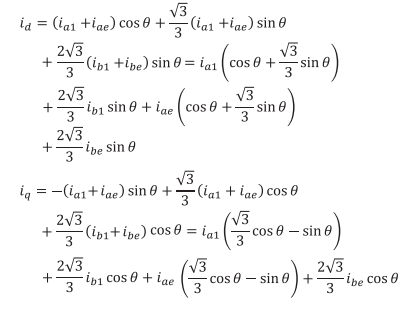
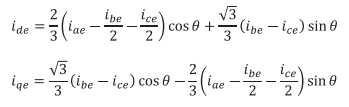
ʹ���Ƶ���ʽ��ȷ����������Ӱ�졣����2���������������ia������ʱ��(iae = 0)���в�����ib���ӳ�����½��в��������� ibe �� 0������������£���ʽ9����������Ϊ��
 (13)
(13)
����3���������������ia��ic������ʱ��(iae = ice = 0)���в�����ib���ӳ�����½��в���(ibe �� 0)������������£���ʽ12����������Ϊ��
 (14)
(14)
�ӹ�ʽ13��14���Ƴ�һЩ��Ȥ�Ľ��ۡ����ȣ�Clarke/Park�任�õ��������ķ�ʽ��ͬ��
 (15)
(15)
���ԣ��������ϵͳ��һ��������������ӳ٣����������ͨ ������������Ӱ�콫�ȶ�������ͨ����ϵͳ��Ӱ���1.73����
���ù�ʽ13��14������ȷ�������ӳٶԵ��Ť�ص�Ӱ�졣�� �ڴ˷������ٶ�����������(V000��V111)ʩ�����ѹʱ����λ�������в����������ڴ��ڼ䣬Ψһ�ĵ�ѹ����di/dtΪ BEMF����������BEMF��di/dtҲ���������Һ���������BEMF�� ��ʱdi/dt = 0��BEMF�ﵽ��ֵʱdi/dt�ﵽ������ڣ�������� �����������ʱ�̵Ĺ̶��ӳ��¶���λ���������������Ϊ�����ͣ�
 (16)
(16)
���У�x = a��b��c����Ϊ�����dq�ο�ϵ����λ�ǡ�ʹ�ù�ʽ13��ide��Ϊʾ����
 (17)
(17)
��cos (�C ��)Ϊʧ������cos(2 �� �C ��)Ϊ����������Ƶ�ʴ��Ľ���������dq�����а�����Щ��������˵��Ť�ؽ��������Ƶķ�����������ע�⣬�����������������dq�ο�ϵ��ѡ������� = �C�У�����ζ��ʧ����Ϊ�㡣������ͨ������������ͼ3���� ��������������������ϵͳ֮��IJ�ͬ��
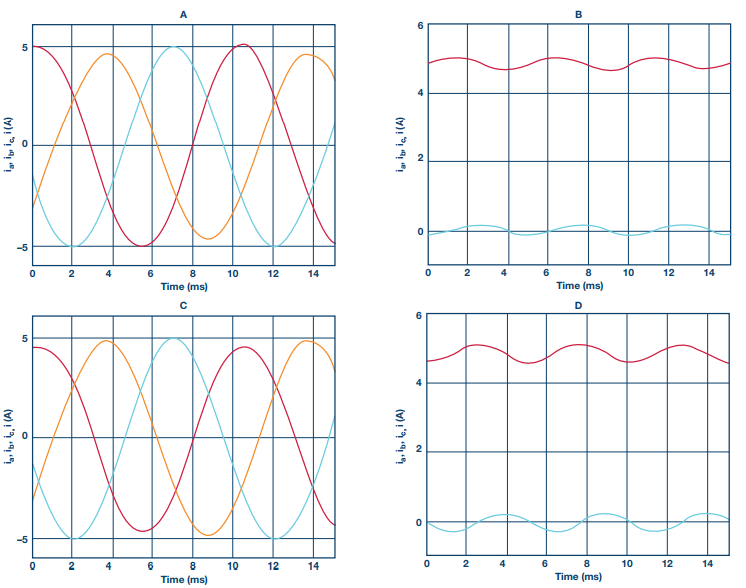
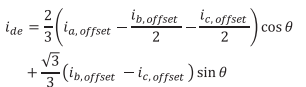
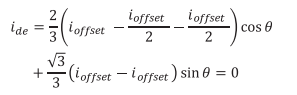
ͼ3���������ʱ�̵�Ӱ�졣ia��ib��ic��id��iq���ֱ����������������(A��B)����������������(C��D)��
������ͼ3A��3B��ʾ����������������ע�⣬ib�����ӳٽ��� �µ���(Ť���Ʋ�)Ϊ����Ƶ�ʵ�2����������ע�⣬id��iq��ֱ�� ��������Ӱ�졣
������ͼ3C��3C��ʾ����������������ע�⣬ib�����ӳٽ��� �½���������������������ʱ��1.73�������⣬id��iq��ֱ���� ��Ҳ����Ӱ�졣
3.3 ����ȵؼ�С����ʱ������Ӱ��
���ڿ��ƻ�·������Ҫ����ߣ����Ա�������ȵؼ�С���� ʱ������Ӱ�죬��������ADC�ֱ���������Խ��Խ�ߵ����\�¡�����ǰ��10��12λADC�ܳ�����������16λ�ķֱ���Ҳ�ѳ� Ϊ��̬��Ӧ���ú���Щ�����λ�����������ADC��ֵ����ϵͳ�ӳ���ɵĵ�λ��ʧ����Ӱ�졣
����ȵؼ�С����ʱ����������Ч��ʽ�ǣ������ܿ����� ����λ���������ʱ�̡�����ܵ���ѡ��һ��������ֿ��ƿ� �ص�Դת���������Ż��Ŀ����������⣬�Ż�դ��������·�еĴ����ӳ�/ƫб�����л���Ӱ�졣
�������ȵؼ�Сʱ������Բ�������Ҫ�����ͨ��ʹ������������������һ�������������������ֵ�·��ADC��ʵ�����ܵ�����������
4. ʧ�����
�Ƶ���ʽҲ������ϵͳ�Բ�õ����ϵ�ʧ������Ӧ��ʽ�����ȣ�ͨ���۲������������������ʹ�ù�ʽ9��ide��Ϊʾ�����ɽ���������ʾΪ��
 (18)
(18)
ia,offset��ib,offset�ֱ�Ϊaͨ����bͨ����ʧ������ͼ�п��Կ�����ʧ���������ڵ���Ļ���Ƶ�ʴ����ֵ���(��Ť��)�Ľ������������ϵͳ������ʱ������ʧ��У��������ʣ��ʧ��������Ư����ɡ�����������£��ٶ�������Ư�Ƶķ�ʽ��ͬ����ɽ��� ����Ϊia,offset = ib,offset = ioffset��
 (19)
(19)
����ζ����������������λƫ�Ʒ��ȵ�������������������q�������Ҳ�ɵó����ƵĽ�������������������������ִ����ͬ�IJ��������ֹ�ʽ12��ideΪ��
 (20)
(20)
���ݳ�ʼʧ���ѵõ�У�����д�����Ư��ֵ��ͬ��������ia,offset = ib,offset = ic,offset = ioffset��
 (21)
(21)
ͬ�����������������������ƺ����ԣ������������ϵ�ʧ���� ������Ť���Ʋ�Ӱ�졣��ʹ��������������ȫ��ͬ�ķ�ʽƯ �ƣ�Ҳ�ܿ�����ʾ��ͬ�����ơ���ˣ��������������ý�ʹ����δУʧ������ϵͳ��ʼ�վ��зdz��͵�Ť���Ʋ���
4.1 ����ȵؼ�Сʧ������Ӱ��
��������ʧ���ǵ���������е�Ť���Ʋ�����Ҫ����֮һ��Ӧ����ȵؼ��١�һ����ԣ�����������������ʧ�������ȣ�����ʱ��㡢�����¶ȶ����ھ�̬ʧ������Σ�ʧ��Ư�����¶Ⱥ�ʱ��Ȳ����ĺ���������ȵؼ�С��̬ʧ��Ӱ���һ�ֳ���������ִ��ʧ��У��У��������ʱ��ÿ�ε���� ��Ϊ0ʱ����(ͨ���ڵ��ֹͣʱ)������������ַ�������̬ʧ��ͨ���������⡣
ʧ��Ư�ƴ������������ӡ���������һ��ͨ���ڵ������ʱ����������Ư�ƣ�������Խ�������У������ͨ������ֹͣ������������һЩ���ڹ۲���������У������4���۲��������ڵ�������ͻ�еϵͳ���ͺš�Ϊʹ���߹�����Ч����Ҫ���������ȷ֪ʶ������ʵͨ��������ˡ�
����֮ǰ���۵ģ�����ȵؼ�Сʧ��Ư�Ƶ�����Ч�����Dz��������������������ͨ��������ͬ���͵�Ԫ������ͨ����Ư�ƺܿ������ơ���������������ʧ���ᱻ���������ҽ��������Ť���Ʋ�����ʹͨ��������ͬ����Ư�ƣ�ֻҪ��������ͬ������Ư�ƣ�����ͨ��������ʧ�����е���Ч����
�������������������ʹͨ������ͬ����Ư�ƣ�Ť���Ʋ���Ȼ���ڡ�����֮��������������ϵͳ��ʧ��Ư�Ʒdz����С�����������£�����Ť���Ʋ���Ψһ������ȷ��Ư�Ʊ��ֽ�С��״̬������ܻ����ӳɱ��ͷ���ϵͳ�����ԡ�����һ�����������Ҫ��3ͨ������ϵͳ������һ�ָ��Լ۱ȵĽ����������һ�㾭����ʵ��֤��
5. �������
��ϵͳ�ڵ��������Ͼ����������ʱ������ź�ixe��ʵ����λ����ix1 (x = a��b��c)�����ȣ�
 (22)
(22)
���ǻ���Ƶ��ʱ�����������Կ�����������������������������ʱ������������������(����ʽ16)����ˣ����Ƴ� ��ͬ�Ľ��ۣ�
�� �������ͨ���Ͼ�������ͬ����������������Ť���Ʋ���������������������2ͨ����3ͨ��ϵͳ��
�� ������������ͨ����ͬ���죬������������Ƶ�ʴ�����Ť���Ʋ���
�� 2ͨ�����������������������г̶ȱ�3ͨ������������1.73����
6. ʵ����֤
ʧ�������������Բ�õ��������Ť�ص�Ӱ����ͼ4��������ʵ�������еõ���֤��
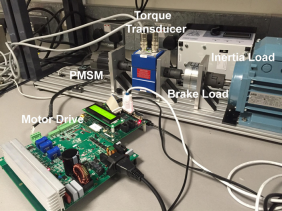
ͼ4. �����豸���á�
�������еĵ���������·�ڵ��������λ�������˻���ЧӦ������������������ѡ��2���3�����������ʧ��У�ڵ��δ����ʱִ�У��������������ʱ(û��ʱ�����Ư��ЧӦ)��ʧ������������൱С�������¶�Ư��(������У����)��ͨ��������ִ�����Ϊ��������������Ӱ�죬У�������������л��������˹�ƫ�������������ɿ����㷨�ó��IJ��������ʵ������ͬ��ʵ��������������Ӱ�죬�����ϸ��������ۡ�ͼ5�������趨�ٶȲο�Ϊ520 rpm���������ʱ�����Ƶ��Ϊ35 Hz��
��Ȼ������������d���q�������������Ժ㶨����ֵʱ��Ϊ��ά���趨�ٶȣ�ʵ�ʵ�����������г����������������ʧ����������¡���Щг��������ֱ��Ӱ�����Ť���Ʋ�����ͼ 6��ʾ������ע�⣬���ڲ����豸�����������λ����˴��������Ļ�еŤ��������������ڻ�еƵ�ʺͲ��ֵʹ�г���������ǣ���Ȼ�������������ʧ�����������Դ��ص�г���ɷֱ仯������ʧ������Ƶ��(35 Hz)����г����������ʧ�����ٷֱȳɱ�����������ͼ��ʾ��ͬʱ��Ƶ����������г���ɷ����������ǶԳ������ӣ����������Ԥ��ġ�
���⣬3�������Ӱ�����ͼ7�����������ʧ������ӦŤ���Ʋ���ȫ����������������ӦŤ���Ʋ�����1.73��������һ��֤ʵ�����ۼ���Ľ����
�ܽ�
ͨ�������Ͳ��������������˵�������ϵͳ�еķ�����ЧӦ���Ӱ��ϵͳ���ܡ�ǰ��˵�������������������ϵͳ���ԱȲ����������������ϵͳ�����ܲ�����
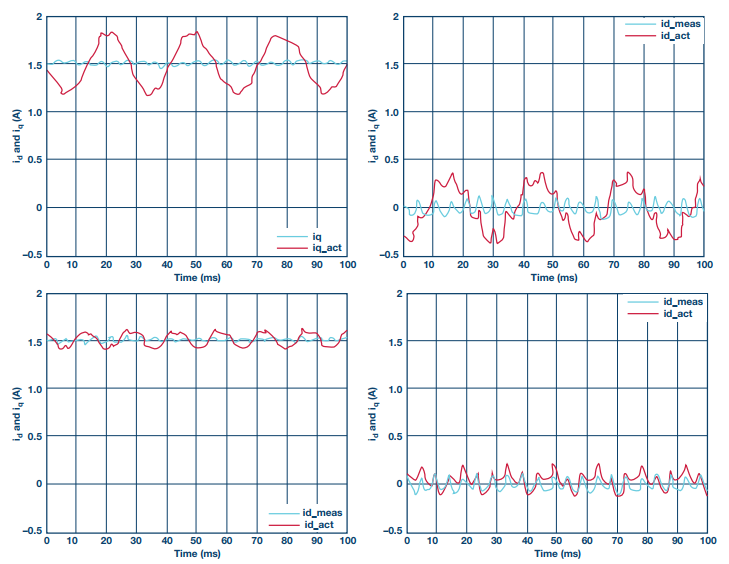
ͼ5. ʵ��ֵ(��ɫ)�Ͳ��ֵ(��ɫ)(��������)������1%ʧ������iq��id�����в��Գ��������(1.05/0.95)��iq��id��
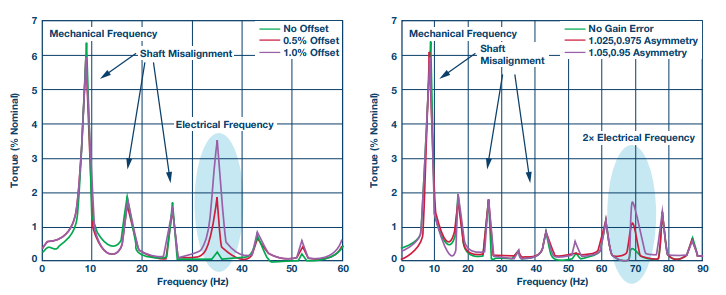
ͼ6. ����2���������ʱ��õ�Ť���Ʋ��ı��ֵ�ٷֱȣ��Լ�(��)Խ��Խ���ʧ������(��)Խ��Խ���������
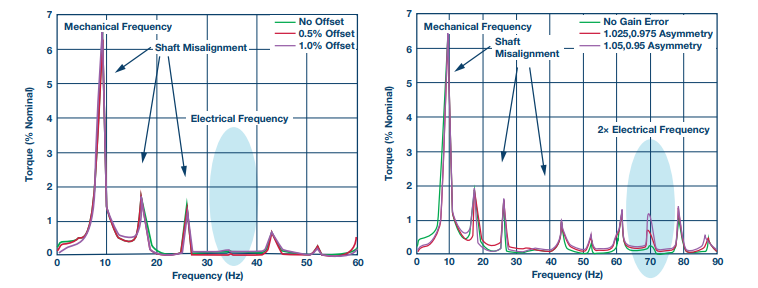
ͼ7. ����3���������ʱ��õ�Ť���Ʋ��ı��ֵ�ٷֱȣ��Լ�(��)Խ��Խ���ʧ������(��)Խ��Խ���������