| ������������VCU�����綯�����Ĵ��ԣ��൱�ڵ��Ե�Windows���ֻ���Andrio����Ϊ�綯������ȫ������������ƽ̨�������������ӣ�ֱ��Ӱ�������������ܵķ��ӣ����������ܺû��ľ���������֮һ��
1 ���
�ṹ���
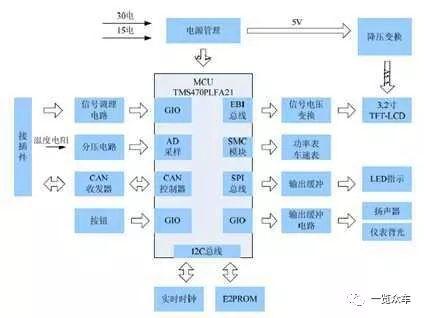
VCU���ṹ�ϣ��ɽ��������һ��PCB��·����ɡ�
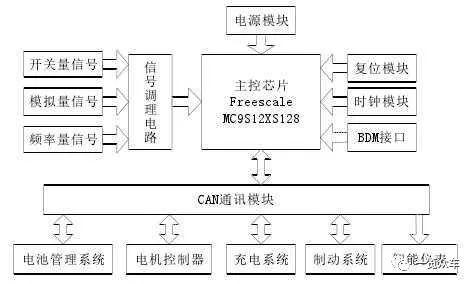
Ӳ�����
������������оƬ�����ܱߵ�ʱ�ӵ�·����λ��·��Ԥ���ӿڵ�·�͵�Դģ�������Сϵͳ��
����Сϵͳ���⣬һ�㻹�䱸�����źŴ�����·��ģ���źŴ�����·��Ƶ���źŴ�����·��ͨѶ�ӿڵ�·������CANͨѶ�ӿں�RS232ͨѶ�ӿڣ�

2 ��������VCU֮��������������
һЩ���ڼ�������״̬���źŻ��߳��ز����бȽ���Ҫ�Ŀ����źš�ģ���źź�Ƶ���źţ��ɴ�����ֱ�Ӵ��ݸ�VCU������ͨ��CAN���ߡ�
�綯�����ϵ��������ж���ϵͳ�ĵ�����һ��ͨ������CAN���ߵķ�ʽ������Ϣ���ݡ�
2.1 ֱ�Ӵ��ݵ��ź���
������˵�Ŀ����źŰ�����Կ���źţ���λ�źţ���翪�أ��ƶ��źŵȣ�
ģ���ź�һ���У�����̤���źţ��ƶ�̤���źţ���ص�ѹ�źŵȣ�
Ƶ���źţ����糵�ٴ������ĵ���źš�
����Ŀ�������������ع����·�ϵĽӴ�����Ԥ��̵�������һЩ�����ϣ���VCU������ơ�
2.2 ͨ��CAN�����ĵ�����Ԫ
CAN�����ϵ�ͨѶ�����ߵ�λ�������ӣ���ʱ��������߷�����Ϣ����Ϣ֮����Ⱥ�˳���ɷ�����Ϣ�ߵ����ȼ�ȷ�������ȼ���ͨѶЭ�����Ѿ������涨��ÿ����Ϣ�ﶼ�з����ߵĵ�ַ���룻
ͨѶ�е���Ϣ���룬������Ӧ��ͨѶЭ��������ȷ�涨��˭����ʲô���Ĵ����ṩ��Щ���͵���Ϣ����Ҫ�����ǹ���˫����Լ����������������еĵ�����Ԫ��ַ���룬��������һ����������VCU��Ӧ�̵ļ���Э�顣

CAN���ϼ�¼����ά������Ա��õ�С���֡���ͼ��ͨѶЭ���жԹ��ϴ���Ĺ涨�������Ĺ������Ͷ�λ�����У�ֻҪ����Э�����Ҷ����Զ������ϼ�¼�ˡ�
�Ƚ�������dz任����ص�ϵͳ������ͨ���Ե�ǿ������ͨѶЭ����Ҫͳһ���й��ұ�����ͳһ���루�����о�����ع��꣩��
2.2.1 VCU�붯�����ϵͳ
��������Ǵ��綯����������Ψһ��Դ��VCU���ع���ϵͳ��BMS��ͨ������CAN���߽�����Ϣ������
������ذ�ʵʱ��Ⲣ�ϱ���VCU�����������ܵ������ܵ�ѹ����ߵ����ѹ����͵����ѹ������¶ȣ���ذ��ɵ�״̬SOC��State of Charge����ijЩϵͳ������ذ�����״̬SOH��State of Health����
VCU������ذ������������磬�ŵ�Ϳ���ָ�
��磬������ij�������ź�ȷ�Ϻ��������ڽ�ֹ�г�״̬��VCU��������Ȩ�������������ɵ�ع���ϵͳ��BMS���ͳ�����ͬ��ɣ�ֱ�������ɻ��߳���жϣ���������Ȩ���»ص�VCU���С�
�ŵ磬VCU���ݼ�ʻԱ��ͼ������������Ĺ���������ɵ���������BMS��BMS��������SOC���¶Ⱥ�ϵͳ�����ֵ��ȷ���ṩ�ĵ���ֵ��
���ȹ���ϵͳ��Ҫʹ�õ�ذ��������Դʱ����Ҫ��ذ���VCUЭ�������ù������̣�����ѹ����ϵͳ����ȴҺѭ��ϵͳ�ȵĿ����رա�����ȹ�������ֻ�漰��ذ��ڲ����������翪�����õ�PTC������Ĥ���ȣ����߿������Ƚ��£�����Ϣֻ�ڵ�ذ��ڲ��������ɣ�����Ҫ��VCU��ͨ��
����ָ��ڳ�ŵ翪ʼ֮ǰ��VCU��������ǿ��ϵͳ�Ƿ��ϵ磬ͨ�����Ƶ�ذ�������·�Ӵ���ʵ�֡��ڳ������й����У�����ͻ��״����VCU�����ж��Ƿ�պϻ��߶Ͽ�����·�Ӵ�����
2.2.2 VCU�������������
VCU�������������͵�ָ������������ֵ����������ʹ����Ϣ�����ģʽ��Ϣ�������ƶ������������������������Լ���Ӧģʽ�µĵ��ת�أ�
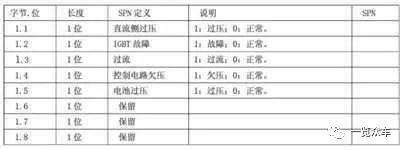
�����������VCU�ϱ�����Ϳ������ĸ��ֲ��������ϱ�����Ϣ����Ҫ�����������ת�٣����ת�أ������ѹ�͵�����
2.2.3 VCU����ϵͳ
���ϵͳ�������س������dz��س����������ϻ���������ϵͳ���任��ϵͳ������ġ��䡱��Ҫ��ָ�dz��س��������������ͨ���ԵĿ�������Ҫһ��ͳһ��ͨѶЭ�顣���й��궼��Ŀǰ�����°汾��
GBT 27930-2015 �綯�����dz��ش���ʽ�������ع���ϵͳ֮���ͨ��Э��
GB�MT 32895-2016 �綯�����컻�����ͨ��Э��
GBT 32896-2016 �綯�����������ܳ�ͨ��Э��
��ͳһ�涨�˳�����̣����������ͨѶ���룬ͨѶ�������ݡ�
�Գ��ǹ�복���ϵij��ӿڵ���������Ϊ���ˣ������������е���Ϣ�������ڵ�ع���ϵͳ�ͳ���֮����У�����ͨ��VCU��
2.2.4 VCU���ƶ�ϵͳ
���ø����ƶ�ϵͳ�ĵ綯��������Ҫ�ۺϿ���Һѹ�ƶ�ϵͳ������ƶ��ͷ�����ϵͳ��ABS����Э��һ���ԣ�������Ҫ���Լ��Ĺ���ϵͳ����Ϊ�ƶ�����ϵͳ��BCU����BCU���Զ�����VCU֮�⣬ֻͨ��CANͨѶ��Ҳ���ѹ��ܼ��ɵ�VCU�ڲ���
�����ƶ�̤��Ŀ��ȺͿ��ȱ仯���ٶȣ�VCU������������ƶ��������أ����ݸ�BCU��BCU���ݳ����ľ���״̬�����������ط��䡣
�����еȵ�һ���ƶ���ֱ�����������������ƶ�������������Ļ����ƶ�������
���ٸߣ���ʻԱ����̤�壬��Ҫ�����ƶ�����BCU����������Һѹ�ƶ�ϵͳ��������״̬�ȶ��Ժ����������������ƶ������Ӵ������
��ʻ�ڱ�ѩ·�棬BCU�������ABS�����������ȼ�����Ϊ��ߣ��Գ���������ȫ��ʻΪҪ��
2.2.5 VCU�������DZ�
�綯�����DZ��̣���ϴ�ͳ��ԭ���IJ��ã�����GB/T 19836-2005 ����ʾ���������Ҫ�����±���ʾ��
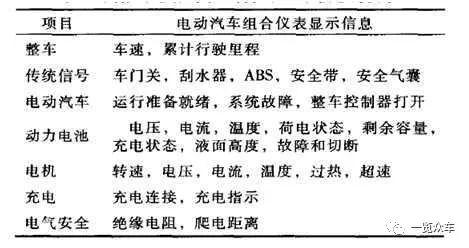
�����DZ����߶˺͵Ͷ˵�ԭ������Ƚϴ�����ֻ������һ����ʽΪ����
�DZ�ϵͳͨ��CAN������VCU��������VCU��ȡ��Ҫ��ʾ�����ݡ����ݴ�����DZ��������Ժ��źŴ�����·������Ϣ��ԭ�ɸ����DZ�����ʾ���ݡ�
��һ����ָ��ʽ�DZ�����Ҫ�Բ������Ϊý�飬�ѻ�õ�����ת��������������ת�Ķ��������Ƚ�һ���Һ����ʾ��������Ҫ�����������������̣�ֱ��ͨ����Ϣ��������������ʾ����ʵʱ��ʾ��������һ�������DZ�Ӳ����ƿ�ͼ��������ø�����ʶ��
3 ����������
VCU��Ϊ�����ĺ��ģ����ƺͼ���ų�����ÿһ�������������Ŀ��ƹ��̣�������Բ�ͬ������ģʽ���Թ��еļ����������бȽϡ����������ĸ���Χ��������ִ������������ģʽ��
��������ģʽ��һ��Ļ��ַ����յ�ģʽ����������ģʽ���ƶ�ģʽ��ʧЧ����ģʽ����ģʽ�ͳ��ģʽ��
���水�ճ����IJ�ͬ����ģʽ�����Խ������Ĺ������̡�
3.1��ģʽ
���ģʽ������Ҫ�ص��ǣ�������ģʽ�Ժ������������ˮƽ·�棬�������Խ�С���ٶȿ�ʼ��ʹ�������������б���ϣ��������ٻ�ά��סԭ�ز�����״̬��������ģʽ��������ƣ���ģʽ�£����ز�̤����̤�壬����Զ����һ������ת�أ���ֹ�ﳵ��
3.2��������ģʽ
ָ����������������״̬���������٣����٣���������������У�VCU��������������ϵͳ��������ѹ���¶ȵȲ������Լ����������ij��٣������ʵȵ��г�������ʶ���ʻԱ��ͼ�����ռ���̤��Ŀ��ȺͿ��ȱ仯�ʣ�������������ת�غ͵�ص�������ʡ�
3.3�ƶ�ģʽ
�ƶ�̤�屻���£����ƶ�ģʽ��VCU�����ƶ�̤��Ŀ��ȺͿ��ȱ仯���Լ����٣���ϳ��������ij��Ͳ����������ƶ����ء�ָ���ƶ���������������������ƶ����ط��䷽�����ṩ�ƶ����ص��������Һѹ�ƶ�ϵͳ�͵�������ƶ������Լ��Ƿ���������ABS�����ƶ����̡���ȫ��Ч��ʵ�ּ�ʻԱ���ƶ���ͼ��
3.4 ʧЧ����ģʽ
�綯�������й����У���ϵͳ�ڳ��ֵĹ��϶���ɼ����ȼ���
���ϵȼ���͵ģ�һ��ֻ����ʾ��ʻԱ���������¶ȴﵽ50��C��
���ϵȼ���ߵģ���ǿ�Ƴ�����һ���Ƚ�С��ʱ����ͣ�������������ϵͳ��Ե���ϡ�
������֮��Ĺ��ϣ�����ǿ��ͣ��������Գ���������״̬�������ơ������ص���SOC����30%��������ʻ����ʱ�Ķ������ϵͳ���Ѿ����������ʣ���ֻ����һ����С�Ĺ��ʹ�����
3.5 �յ�ģʽ
����복���Ĵ���ϵͳ֮��û�л�е���ӣ������������״̬��������������κ�ת�ء�
3.6 ���ģʽ
���ǹ�복����������������ȷ�Ϻ�����Դ�ϵ磬��������ֱ��IJ���ɾ�Ե��⡣
������ɣ����в���ȷ�ϡ��������ͳ����������������ģ�BMSȷ�ϣ��Ƿ���������������磬�����ɣ����͵�ذ���������������
������ʽ���Σ��ڴ˹����У�������BMSʵʱ�����״̬��Ϣ��BMS�����Է������������
�����������б���������BMS�IJ�ͬ���ö�������ͬ��һ���������������ѹ�Σ�����˥����һ���趨ֵ�����趨�ı��ʣ�����Ϊ��ذ��Ѿ������������̿��Խ�����
�����У��κ�һ���������ϣ�������¡������ȣ��������ᷢ�����������ݹ��ϵȼ��IJ�ͬ���е�ֱ����ֹ���еĵȴ���Ϊ������
5 ��������
��������ҵ��Vģʽ�����Ѿ���һ�����ϵĸ�Чģʽ��VCU�Ŀ������̣�һ��Ҳ����ѭ������̡�������һ��ͨ�õ�Vģʽ��������ͼ��
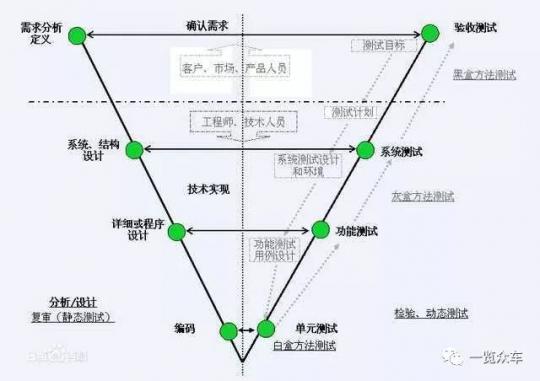
Vģʽ���������������ͨ��Эͬ������ʹ��������ƴﵽ��Ч����ʼ�õ�Ŀ�ġ�ģ�͵�ˮƽ����ǿ����֤�ļ�ʱ�Ժ������ԡ�ͨ�õľ��飬�ڡ�V���ֵ������棬�Ƚϻ����Ĺ��������ðв��ԣ�Խ���ϣ�ϵͳԽ���ӣ���������ںв��Թ��ȡ�
���������������Ŀ������̣�
���ȣ�������������������ѧģ�ͣ�������ģ�ͷ��棻
Ȼ��ģ���������ص�����ԭ���У���Ӳ���ӿ����ԭ��ģ���е����ӿڣ�
��һ��������רҵ����������C���룬��ײ���ɺ�ͨ���ӿڳ������ص�����������Ӳ���У������е��ԡ���������У�ÿ������ģ���ֱ���е��ԣ�
��������Ӳ���ڻ�������ԣ�����ģ����ģ������л�������VCU���й��ܲ��ԣ�
���VCUװ����ʵ�����������ͨѶЭ��궨������ͨ���õ���Ʒ�ĵ�һ���档
6 ��Ҫ����
���綯�����������������������������㲿����ͷ�ǹ��⳧�����壬��¶�������½���������ŵȡ�
���ڣ��Ծ߹�ģ�ij��������������з�����������������ǵϡ���������������ͨ�������ȣ������Լ����ס������������ҪVCU��Ӧ�̻���һЩ������ң��������������������㴨�����ȡ�
����������������оƬ���ܺ�ϵͳ���ɶȣ��ǹ��ڳ����������ܵ���Ҫƿ���� |